Dynamiska system och deras egenskaper. dynamiskt system
dynamiskt system- en upps?ttning element f?r vilka ett funktionellt f?rh?llande mellan tid och position i fasrummet f?r varje element i systemet ?r specificerat. [ ] Denna matematiska abstraktion g?r det m?jligt att studera och beskriva utvecklingen av system i tiden.
Tillst?ndet f?r ett dynamiskt system vid varje tidpunkt beskrivs av en upps?ttning reella tal (eller vektorer) som motsvarar en viss punkt i tillst?ndsrummet. Utvecklingen av ett dynamiskt system best?ms av en deterministisk funktion, det vill s?ga efter ett givet tidsintervall kommer systemet att inta ett specifikt tillst?nd, beroende p? det aktuella.
Introduktion
Ett dynamiskt system ?r en matematisk modell av n?got objekt, process eller fenomen d?r "fluktuationer och alla andra statistiska fenomen" f?rsummas.
Ett dynamiskt system kan ocks? representeras som ett system med stat. Med detta tillv?gag?ngss?tt beskriver det dynamiska systemet (som helhet) dynamiken i n?gon process, n?mligen: processen f?r system?verg?ngen fr?n ett tillst?nd till ett annat. Fasrummet f?r ett system ?r helheten av alla till?tna tillst?nd i ett dynamiskt system. S?ledes k?nnetecknas ett dynamiskt system av dess initiala tillst?nd och den lag enligt vilken systemet ?verg?r fr?n initialtillst?ndet till ett annat.
Skilja mellan system med diskret tid och system kontinuerlig tid.
I system med diskret tid, som traditionellt kallas kaskader, systemets beteende (eller, vad ?r detsamma, systemets bana i fasrummet) beskrivs av sekvens stater. I system med kontinuerlig tid, som traditionellt kallas str?mmar, ?r systemets tillst?nd definierat f?r alla tids?gonblick p? den verkliga eller komplexa axeln. Kaskader och fl?den ?r huvud?mnet f?r ?verv?gande i symbolisk och topologisk dynamik.
Ett dynamiskt system (med b?de diskret och kontinuerlig tid) beskrivs ofta av ett autonomt system av differentialekvationer, givet i n?gon dom?n och som d?r uppfyller villkoren f?r existenssatsen och det unika i l?sningen av differentialekvationen. Det dynamiska systemets j?mviktspositioner motsvarar differentialekvationens singul?ra punkter, och de slutna faskurvorna motsvarar dess periodiska l?sningar.
Huvudinneh?llet i teorin om dynamiska system ?r studiet av kurvor definierade av differentialekvationer. Detta inkluderar uppdelningen av fasutrymmet i banor och studiet av det begr?nsande beteendet hos dessa banor: s?kning och klassificering av j?mviktspositioner, val av attraherande ( attraktionskrafter) och motbjudande ( repellers) set (sorter). De viktigaste begreppen i teorin om dynamiska system ?r stabiliteten i j?mviktstillst?nd (dvs. f?rm?gan hos ett system, med sm? f?r?ndringar i de initiala f?rh?llandena, att f?rbli under en godtyckligt l?ng tid n?ra j?mviktspositionen eller p? ett givet grenr?r) och grovhet (dvs. bevarandet av egenskaper med sm? f?r?ndringar i sj?lva den matematiska modellen; " grovt system- detta ?r s?dant, vars r?relsers kvalitativa karakt?r inte f?r?ndras med en tillr?ckligt liten f?r?ndring av parametrarna").
Inblandning av probabilistisk-statistiska representationer i den ergodiska teorin om dynamiska system leder till begreppet ett dynamiskt system med of?r?nderligt m?tt.
Den moderna teorin om dynamiska system ?r ett samlingsnamn f?r studier d?r metoder fr?n olika grenar av matematiken anv?nds flitigt och effektivt kombineras: topologi och algebra, algebraisk geometri och m?ttteori, teorin om differentialformer, teorin om singulariteter och katastrofer.
Metoder f?r teorin om dynamiska system ?r efterfr?gade inom andra grenar av naturvetenskapen, s?som termodynamik som inte ?r j?mvikt, dynamisk kaosteori, synergetik.
Definition
L?ta X (\displaystyle X)?r ett godtyckligt j?mnt grenr?r.
dynamiskt system, definierad p? ett j?mnt grenr?r X (\displaystyle X), kallas kartl?ggning g: R x X -> X (\displaystyle g\colon R\ g?nger X\till X), skriven i parametrisk form g t (x) (\displaystyle g^(t)(x)), var t ? R , x ? X (\displaystyle t\in R,x\in X), som ?r en differentierbar karta, och g 0 (\displaystyle g^(0))- identitetskartl?ggning av rymden X (\displaystyle X). I fallet med station?ra reversibla system, enparameterfamiljen ( g t: t ? R ) (\displaystyle \(g^(t):t\in R\)) bildar en grupp av transformationer av det topologiska rummet X (\displaystyle X), och d?rmed i synnerhet f?r alla t 1 , t 2 ? R (\displaystyle t_(1),t_(2)\i R) identiteten g t 1 ? g t 2 = g t 1 + t 2 (\displaystyle g^(t_(1))\circ g^(t_(2))=g^(t_(1)+t_(2))).
Fr?n kartl?ggningens differentierbarhet g (\displaystyle g) det f?ljer att funktionen g t (x 0) (\displaystyle g^(t)(x_(0)))?r en differentierbar funktion av tid, dess graf ?r placerad i det ut?kade fasutrymmet R x X (\displaystyle R\times X) och ringde integrerad bana(kurva) dynamiskt system. Dess projektion ut i rymden X (\displaystyle X), som kallas fasutrymmet, kallas fasbana(kurva) dynamiskt system.
Att specificera ett station?rt dynamiskt system ?r ekvivalent med att dela upp fasutrymmet i fasbanor. Att specificera ett dynamiskt system ?r i allm?nhet ekvivalent med att dela upp det ut?kade fasutrymmet i integrerade banor.
Metoder f?r att definiera dynamiska system
F?r att definiera ett dynamiskt system ?r det n?dv?ndigt att beskriva dess fasutrymme X (\displaystyle X), upps?ttning tider T (\displaystyle T) och lite regel, som beskriver fasrumspunkters r?relse med tiden. M?nga tidpunkter T (\displaystyle T) kan vara b?de ett intervall av den verkliga linjen (d? s?ger vi att tiden kontinuerligt), och m?ngden heltal eller naturliga tal ( diskret tid). I det andra fallet ?r "r?relsen" f?r en fasrumspunkt mer som momentana "hopp" fr?n en punkt till en annan: banan f?r ett s?dant system ?r inte en j?mn kurva, utan helt enkelt en upps?ttning punkter, och kallas vanligtvis en bana. Trots den yttre skillnaden finns det ?nd? ett n?ra samband mellan system med kontinuerlig och diskret tid: m?nga egenskaper ?r gemensamma f?r dessa klasser av system eller ?verf?rs l?tt fr?n ett till ett annat.
Fasfl?den
L?t fasen rymma X (\displaystyle X) representerar ett flerdimensionellt rum eller ett omr?de i det, och tiden ?r kontinuerlig. Anta att vi vet hur snabbt varje punkt r?r sig x (\displaystyle x) fasutrymme. Med andra ord ?r hastighetsvektorfunktionen k?nd v (x) (\displaystyle v(x)). D? blir punktens bana l?sningen av den autonoma differentialekvationen d x d t = v (x) (\displaystyle (\frac (dx)(dt))=v(x)) med initialt skick x (0) = x 0 (\displaystyle x(0)=x_(0)). Det dynamiska systemet som definieras p? detta s?tt kallas fasfl?det f?r en autonom differentialekvation.
Kaskader
L?ta X (\displaystyle X)?r en godtycklig upps?ttning, och f: X -> X (\displaystyle f\kolon X\till X)- lite kartl?ggning av upps?ttningen X (\displaystyle X) till mig sj?lv. Betrakta iterationer av denna mappning, det vill s?ga resultatet av dess upprepade applicering p? punkter i fasrummet. De definierar ett dynamiskt system med fasutrymme X (\displaystyle X) och m?nga g?nger T = N (\displaystyle T=\mathbb (N) ). I sj?lva verket kommer vi att anta att en godtycklig punkt x 0 ? X (\displaystyle x_(0)\in X) under 1 (\displaystyle 1) g?r till saken x 1 = f (x 0) ? X (\displaystyle x_(1)=f(x_(0))\in X). Sen i tiden 2 (\displaystyle 2) denna punkt kommer att g? till punkten x 2 = f (x 1) = f (f (x 0)) (\displaystyle x_(2)=f(x_(1))=f(f(x_(0))))) etc.
Om displayen f (\displaystyle f) reversibel, kan man definiera omv?nda iterationer: x - 1 = f - 1 (x 0) (\displaystyle x_(-1)=f^(-1)(x_(0))), x - 2 = f - 1 (f - 1 (x 0)) (\displaystyle x_(-2)=f^(-1)(f^(-1)(x_(0))))) etc. S?ledes f?r vi ett system med en upps?ttning tidpunkter T = Z (\displaystyle T=\mathbb (Z) ).
Exempel
- System av differentialekvationer
definierar ett dynamiskt system med kontinuerlig tid, kallad "harmonisk oscillator". Dess fasutrymme ?r planet (x , v) (\displaystyle (x,v)), var v (\displaystyle v)- punkthastighet x (\displaystyle x). Den harmoniska oscillatorn modellerar en m?ngd olika oscillerande processer - till exempel beteendet hos en belastning p? en fj?der. Dess faskurvor ?r ellipser centrerade vid noll.
Fr?gor om teorin om dynamiska system
Med en uppgift f?r ett dynamiskt system ?r det l?ngt ifr?n alltid m?jligt att hitta och beskriva dess banor i en explicit form. D?rf?r ?verv?gs vanligtvis enklare (men inte mindre meningsfulla) fr?gor om systemets allm?nna beteende. Till exempel:
- Har systemet slutna faskurvor, det vill s?ga kan det ?terg? till sitt initiala tillst?nd under evolutionens g?ng?
- Hur ?r systemets of?r?nderliga grenr?r (ett specialfall av vilka ?r slutna banor) arrangerade?
- Hur fungerar systemets attraktionskraft, det vill s?ga upps?ttningen i fasrummet, till vilken "majoriteten" av banor tenderar att fungera?
- Hur beter sig banor som avfyras fr?n n?ra h?ll - h?ller de sig n?ra eller flyttar de sig bort med tiden till ett betydande avst?nd? L?nkar
P? grenr?r och deras delm?ngder. N?ra besl?ktad med teorin om differentialekvationer, eftersom en vanlig differentialekvation definierar en enparameters diffeomorfismgrupp i dess fasrum.
Detta studieomr?de kallas ofta helt enkelt f?r "dynamiska system", "systemteori" eller l?ngre som "matematisk dynamisk systemteori".
M?nster: System
Wikimedia Foundation. 2010 .
- L?gngruppteori
- Teori f?r differentialekvationer
Se vad "Theory of Dynamical Systems" ?r i andra ordb?cker:
METRISK TEORI F?R DYNAMISKA SYSTEM- Samma som ergodisk teori... Matematisk uppslagsverk
ENTROPITEORI F?R DYNAMISKA SYSTEM- en del av ergodisk teori n?ra relaterad till sannolikhetsteori och informationsteori. Denna kopplings karakt?r i allm?nna termer ?r f?ljande. L?t (Tt) vara en dynamik system (vanligtvis m?tbart fl?de eller kaskad) med fasutrymme W och invariant m?tt L?t … Matematisk uppslagsverk
Institutionen f?r icke-linj?ra dynamiska system och styrprocesser, VMK MSU- Institutionen f?r icke-linj?ra dynamiska system och processer vid kontoret f?r fakulteten f?r ber?kningsmatematik och cybernetik vid Moscow State University uppkallad efter M. V. Lomonosov (NDSiPU VMK MSU). Chef f?r avdelningen (sedan 1989) - pristagare av Lenin, staten (USSR och Ryssland), ... ... Wikipedia
Katastrofteori (matematik)- Katastrofteorin ?r en gren av matematiken som inkluderar teorin om bifurkationer av differentialekvationer (dynamiska system) och teorin om singulariteter f?r smidiga mappningar. Termerna "katastrof" och "katastrof teori" introducerades av Ren? Thom och ... ... Wikipedia
Bifurkationsteori- dynamiska system ?r en teori som studerar f?r?ndringar i den kvalitativa bilden av uppdelningen av fasrummet beroende p? f?r?ndringen i en parameter (eller flera parametrar). Inneh?ll 1 ?versikt 2 Bifurcation of equilibria ... Wikipedia
Teori f?r linj?ra station?ra system- ett avsnitt av teorin om dynamiska system som studerar beteendet och dynamiska egenskaper hos linj?ra station?ra system (LSS). Anv?nds i stor utstr?ckning i processen f?r att styra tekniska system, digital signalbehandling och andra tekniska omr?den ... ... Wikipedia
Teori om slumpm?ssiga matriser– Teorin om slumpm?ssiga matriser ?r en gren av matematisk statistik som studerar egenskaperna hos ensembler av matriser, vars element ?r slumpm?ssigt f?rdelade. Som regel ?r lagen f?r f?rdelning av element satt. Samtidigt studeras den egna statistiken ... ... Wikipedia
Knutteori– Knutteori ?r studiet av inb?ddningar av endimensionella grenr?r i tredimensionellt euklidiskt rum eller i en sf?r. I en vidare mening ?r ?mnet f?r knutteori inb?ddningar av sf?rer i grenr?r och i allm?nhet inb?ddningar av grenr?r. Inneh?ll 1 ... ... Wikipedia
Kolmogorovs teori- Kolmogorov-teorin om Arnold Moser, eller KAM-teorin uppkallad efter dess skapare, A. N. Kolmogorov, V. I. Arnold och Yu. Moser, en gren av teorin om dynamiska system som studerar sm? st?rningar n?stan ... ... Wikipedia
Katastrofteori (disambiguation)- Katastrofteori: Katastrofteorin ?r en gren av matematiken som inkluderar teorin om bifurkationer av differentialekvationer (dynamiska system) och teorin om singulariteter f?r mjuka mappningar. Katastrofism (katastrof teori) system ... ... Wikipedia
B?cker
- Synkronisering av dynamiska system, . I denna bok g?rs ett f?rs?k att systematiskt presentera fakta och resultat relaterade till det snabbt v?xande omr?det vetenskap och teknik - synkroniseringen av dynamiska system. Boka ... K?p f?r 735 rubel
- Teori om dynamiska system, G. A. Stepanyants. Denna bok ?gnas ?t presentationen av grunderna f?r den allm?nna teorin om dynamiska system, skapad av verk av ett antal framst?ende inhemska och utl?ndska matematiker. F?rtrogenhet med denna teori till?ter ...
Utg?ngspunkten i skapandet av Levins teori om motivation var tanken att medvetandet best?ms p? tv? s?tt: associationsprocessen och viljan. Han s?g dem som separata tendenser. Levin visade att den avg?rande tendensen, som han kallade kvasi-behov, inte ?r ett specialfall, utan tv?rtom ?r en dynamisk f?ruts?ttning f?r varje beteende. Energikomponenten i beteende har alltid varit f?r Levin den centrala l?nken i att f?rklara en persons avsikter och handlingar.
Den typ av energi som utf?r mentalt arbete kallade Levin mental energi. Det frig?rs n?r det psykiska systemet f?rs?ker ?terf? balansen orsakad av obalans. Det senare ?r f?rknippat med en ?kning av sp?nningen i en del av systemet i f?rh?llande till andra.
Levins f?rsta relativt stora allm?nna teoretiska arbete, d?r han f?reslog en tillr?ckligt detaljerad allm?n psykologisk f?rklaringsmodell f?r beteendedynamik, var hans bok Intention, Will and Need, baserad p? resultaten av de f?rsta experimenten av Ovsyankina, Zeigarnik, Birenbaum, Karsten. I den h?r boken erbjuder Lewin, n?stan utan att diskutera ?ppet med Z. Freud, ett mycket ?vertygande svar fr?n den akademiska psykologin p? utmaningen fr?n Freud, som var den f?rsta att uppm?rksamma omr?det f?r att studera de motiverande krafterna av m?nskliga handlingar som hade varit ignorerade f?re honom.
Levins nyckelbegrepp finns placerade i bokens titel. Enligt Lewin ?r grunden f?r m?nsklig aktivitet i alla dess former, vare sig det ?r association, handling, t?nkande, minne, avsikt - behov. Han betraktar behov som sp?nda system som genererar sp?nningar, vars urladdning sker i handling n?r en l?mplig m?jlighet intr?ffar. F?r att skilja sin f?rst?else av behov fr?n den som redan etablerats inom psykologin och som fr?mst f?rknippas med biologiska, medf?dda behov som korrelerar med vissa inre tillst?nd, kallar Lewin dem "kvasibehov". I begreppet viljeprocesser inkluderar han en rad avsiktliga processer av varierande grad av godtycke, vilket uppm?rksammar ett s?dant s?rdrag som den godtyckliga konstruktionen av ett framtida f?lt d?r sj?lva handlingens b?rjan ska ske automatiskt. En speciell plats i Lewins modell upptar begreppet "Aufforderungscharakter", denna term ?vers?tts som ett incitament (d?r det finns en kvalificering av vad) eller ett incitament (d?r det inte finns n?gon s?dan specifikation). Kvasi-behov bildas i den faktiska situationen i samband med de accepterade avsikterna och yttra sig i att vissa saker eller h?ndelser f?r ett incitament, kontakt med vilket inneb?r en tendens till vissa handlingar. Med det v?lk?nda faktumet att vi alltid uppfattar objekt partiskt, har de en viss emotionell f?rgar f?r oss, m?rker Levin att de ut?ver detta tycks kr?va av oss att utf?ra en viss aktivitet i f?rh?llande till sig sj?lv: ”Bra v?der och ett visst landskap kallar oss f?r en promenad, trappans trappsteg uppmuntrar en tv?- ?r gammalt barn att g? upp och ner; d?rrar - ?ppna och st?ng dem. "Incitament kan variera i intensitet och tecken (attraktiv eller fr?nst?tande), men detta ?r, enligt Levin, inte huvudsaken. Mycket viktigare ?r att f?rem?l framkallar vissa, mer eller mindre sn?vt definierade handlingar, vilket kan vara ytterst olika, ?ven om vi begr?nsar oss till enbart positiva stimuli. De fakta som Levin citerar vittnar om ett direkt samband mellan f?r?ndringar i objektens motivation och dynamiken i subjektets behov och kvasi-behov, samt hans livsm?l.
Lewin ger en rik beskrivning av fenomenologin f?r motivation, som f?r?ndras beroende p? situationen, s?v?l som som ett resultat av genomf?randet av de n?dv?ndiga ?tg?rderna: m?ttnad leder till f?rlust av motivation av objektet och handlingen, och m?ttnad uttrycks i en f?r?ndring fr?n positiv motivation till negativ; samtidigt f?r fr?mmande saker och syssels?ttningar, s?rskilt de som ?r n?got motsatta originalet, ett positivt incitament. Handlingar och deras element kan ocks? f?rlora sin naturliga motivation till f?ljd av automatisering. Och vice versa: med en ?kning av behovens intensitet ?kar inte bara motivationen f?r de f?rem?l som svarar p? dem, utan ocks? kretsen av s?dana f?rem?l expanderar (en hungrig person blir mindre kr?sen).
Levin trodde att en person ?r ett komplext energisystem, och den typ av energi som utf?r psykologiskt arbete kallas psykisk energi. Psykisk energi frig?rs n?r en person f?rs?ker ?terf? balansen efter att ha varit i ett tillst?nd av obalans. Obalans produceras av en ?kning av sp?nningen i en del av systemet i f?rh?llande till andra delar som ett resultat av extern stimulering eller inre f?r?ndringar. Personligheten lever och utvecklas i det psykologiska f?ltet f?r de f?rem?l som omger den, som var och en har en viss laddning (valens). Valens ?r en begreppsm?ssig egenskap f?r regionen i den psykologiska milj?n, det ?r regionens v?rde f?r en person. Hans experiment visade att f?r varje person har denna valens sitt eget tecken, ?ven om det samtidigt finns f?rem?l som har samma attraktionskraft eller fr?nst?tande kraft f?r alla. Genom att p?verka en person orsakar f?rem?l behov hos honom, vilket Levin betraktade som ett slags energiladdningar som orsakar sp?nningar hos en person. I detta tillst?nd tenderar en person att ladda ur, d.v.s. att tillfredsst?lla dina egna behov. Lewin s?rskiljde tv? sorters behov - biologiska och sociala (kvasibehov). En av Levins mest k?nda ekvationer, som han anv?nde f?r att beskriva m?nskligt beteende inom det psykologiska omr?det under p?verkan av olika behov, visar att beteende b?de ?r en funktion av personligheten och det psykologiska omr?det.
F?r att f?rklara dynamiken anv?nder Levin n?gra begrepp. Sp?nning ?r tillst?ndet f?r en intrapersonell region i f?rh?llande till andra intrapersonella regioner. Kroppen str?var efter att utj?mna sp?nningen i denna region i j?mf?relse med andra. Det psykologiska s?ttet att utj?mna sp?nningar ?r processen - t?nkande, memorering, etc. Behov - en ?kning av sp?nningen eller frig?randet av energi i den intrapersonella regionen. Behoven i personlighetsstrukturen ?r inte isolerade, utan h?nger samman med varandra, i en viss hierarki. Behov ?r indelade i fysiologiska tillst?nd (verkliga behov) och avsikter, eller kvasi-behov. Behovsbegreppet speglar individens interna tillst?nd, behovstillst?ndet, och begreppet kvasi-behov ?r likv?rdigt med en specifik avsikt att tillfredsst?lla behovet. "Detta inneb?r att man m?ste tillgripa avsikt n?r det inte finns n?got naturligt behov av att utf?ra motsvarande handling, eller till och med n?r det finns ett naturligt behov av motsatt karakt?r."
Differentiering ?r ett av nyckelbegreppen i "f?ltteorin". och g?ller alla aspekter av bostadsyta. Till exempel k?nnetecknas ett barn, enligt Levin, av en st?rre mottaglighet f?r milj?ns p?verkan och f?ljaktligen en st?rre svaghet av gr?nser i den inre sf?ren, i dimensionen "verklighet-overklighet" och i den tidsm?ssiga sf?ren. ?kad organisation och integration av personlighetsbeteendeteori "f?lt". definieras som organisatoriskt ?msesidigt beroende. Med tillkomsten av mognad uppst?r en stor differentiering b?de i sj?lva personligheten och i den psykologiska milj?n, gr?nsernas styrka ?kar, och systemet med hierarkiska och selektiva relationer mellan sp?nda system blir mer komplicerat.
Det slutliga m?let f?r alla mentala processer ?r ?nskan att ?terst?lla balansen f?r en person. Denna process kan utf?ras genom att s?ka efter vissa valensobjekt i den psykologiska milj?n som kan lindra sp?nningar.
Levins tillv?gag?ngss?tt k?nnetecknades av tv? punkter. F?rst gick han fr?n id?n om att motivets energi ?r st?ngd i kroppen, till id?n om systemet "organism-milj?". Individen och hans milj? framstod som en odelbar dynamisk helhet. F?r det andra, i motsats till tolkningen av motivation som en biologiskt f?rutbest?md konstant, trodde Lewin att motivationssp?nning kan skapas b?de av individen sj?lv och av andra m?nniskor (till exempel en experimenterare som erbjuder en individ att slutf?ra en uppgift). S?ledes erk?ndes sj?lva motivationen som en psykologisk status. Det reducerades inte l?ngre till biologiska behov, genom att tillfredsst?lla som kroppen utt?mt sin motivationspotential.
Levin h?mtade sin id? om motivation fr?n den ouppl?sliga kopplingen mellan subjekt och objekt. Samtidigt togs mots?ttningen mellan det inre och det yttre bort, eftersom de f?rklarades vara olika poler i ett enda utrymme - f?ltet enligt Levin. F?r gestaltpsykologer ?r ett f?lt det som uppfattas som direkt givet till medvetandet. F?r Lewin ?r f?ltet den struktur i vilken beteendet sker. Den t?cker individens motivationsstr?vanden och samtidigt f?rem?len f?r dessa str?vanden. Levin h?rledde beteende fr?n faktumet av interaktion mellan individen och omgivningen. Han var inte intresserad av f?rem?l som saker, utan bara i vilken relation de ?r till individens behov. Motivationsf?r?ndringar h?rleddes inte fr?n personlighetens interna strukturer, utan fr?n f?ltets egenskaper, fr?n helhetens dynamik.
Dessa resultat f?r Levins position n?rmare Adlers och den humanistiska psykologins id?er: vikten av att uppr?tth?lla personlighetens integritet, dess Jag, behovet f?r en person att inse strukturen i sin personlighet. Likheten mellan dessa begrepp, till vilka forskare fr?n olika skolor och riktningar kom, talar om relevansen av detta problem, att m?nskligheten, efter att ha insett det omedvetnas inflytande p? beteendet, kommer till id?n om behovet av att dra en linje mellan en person och andra levande varelser, f?r att f?rst? inte bara orsakerna till dess aggressivitet, grymhet, v?llustighet, vilket psykoanalysen perfekt f?rklarade, utan ocks? grunderna f?r dess moral, v?nlighet, kultur. Av stor betydelse var ?nskan i den nya v?rlden, efter kriget, som visade m?nniskans obetydlighet och br?cklighet, att ?vervinna den framv?xande k?nslan av typiska och utbytbara m?nniskor, att bevisa att m?nniskor ?r integrerade, unika system, som var och en b?r p? sin egen inre v?rld, inte lik v?rlden andra m?nniskor.
Systemets begrepp, systemets huvudsakliga egenskaper.
Systemet - det ?r en upps?ttning element som ?r i interaktion och ?r f?rbundna med en viss struktur.
Grundblocket i varje system ?r dess best?ndsdelar, varje element k?nnetecknas av en upps?ttning tillst?nd d?r det kan vara.
Schema f?r funktion av systemelementet:
M?nga system k?nnetecknas av principen om ?terkoppling - utsignalen kan anv?ndas f?r att korrigera styrningen.
S(t) ?r tillst?ndet f?r elementet vid tidpunkten t.
U(t) – elementkontroll f?r tillf?llet t.
a(t) ?r milj?n f?r elementet f?r tillf?llet t.
E(t) - slumpm?ssiga effekter av elementet i ?gonblicket t.
Y(t) ?r utsignalen fr?n elementet vid tidpunkten t.
I det allm?nna fallet utf?rs beskrivningen av funktionen hos ett systemelement med hj?lp av ett system av differential- eller differensekvationer av f?ljande form:
Y(t) =f(S(t), S(t-1), …,U(t),U(t-1),…,a(t),a(t-1),…,E (t),E(t-1),...)
(Y(t) = g (S(t), a(t), E(t)) (1)
Exempel p? systemstruktur:
linj?r (seriell):
![]()
hierarkisk (tr?dliknande):

radiell (stj?rnformad):

cellul?r eller matris:

multiplicera ansluten - med en godtycklig struktur.
I analysen av dynamiska system ?verv?ger vi l?sningen av f?ljande problem:
Observationsuppgiften ?r att best?mma systemets tillst?nd vid tidpunkten S(t) enligt utg?ngsv?rdena (om deras beteende) i framtiden.
Hitta S(t) vetande  f?r ett system med diskret tid.
f?r ett system med diskret tid.
 f?r system med kontinuerlig tid.
f?r system med kontinuerlig tid.
Uppgiften med identifiering ?r att best?mma det aktuella tillst?ndet S(t) enligt data om beteendet hos utdatav?rdena i det f?rflutna.
3. Prognosuppgifter - best?mma framtida tillst?nd enligt nuvarande och
tidigare v?rden.
Hitta S(t+1), S(t+2),... att veta 
Kontrolls?kningsproblemet ?r att hitta kontrollsekvensen U(t), U(t+1),..., U(S), S > t, vilket f?r systemet fr?n tillst?ndet S(t) = X till tillst?ndet S (S) = Y.
Problemet med syntes av maximal kontroll best?r i en viss optimal sekvens av kontroll?tg?rder U*(t) som l?ser problem 4 och den maximala objektiva funktionen eller funktion:
F(S(t)), t = 0,1,2,...
Systemtyper:
Genom n?rvaron av slumpm?ssiga faktorer:
deterministisk
Stokastisk - p?verkan av slumpm?ssiga faktorer kan inte f?rsummas.
2. Genom att ta h?nsyn till tidsfaktorn:
System med kontinuerlig tid
Diskreta tidssystem
3. Influerad av tidigare perioder:
Markov-system - f?r att l?sa uppgifter 1 och 2 beh?vs information endast f?r den omedelbart f?reg?ende eller efterf?ljande perioden. F?r Markov-system har ekvation (1) formen: G(S(t), S(t-1), U(t), U(t-1), a(t), a(t-1), E(t), E(t-1)) = 0
Icke-markovisk.
N?gra allm?nna egenskaper hos systemen:
kausalitet ?r f?rm?gan att f?ruts?ga konsekvenserna av vissa konsekvenser i framtiden. Del. fall: f?rutbest?mningen av systemet inneb?r att i huvudsak s?dana tillst?nd f?r vilka hela den framtida utvecklingen av systemet kan ber?knas p? basis av tidigare observationer.
styrbarhet - best?r i det faktum att genom ett l?mpligt val av ing?ngs?tg?rden U kan vilken som helst insignal Y uppn?s.
stabilitet - ett system ?r stabilt om, med tillr?ckligt sm? f?r?ndringar i villkoren f?r dess funktion, systemets beteende inte f?r?ndras avsev?rt.
tr?ghet - f?rekomsten av f?rseningar i systemet som svar (f?rdr?jning) p? en f?r?ndring i kontroll och (eller) den yttre milj?n.
anpassningsf?rm?ga - f?rm?gan hos ett system att ?ndra sitt beteende och (eller) sin struktur som svar p? en f?r?ndring i den yttre milj?n.
Deterministiska dynamiska system med diskret tid.
M?nga till?mpningar inom ekonomi kr?ver modellering av system ?ver tid.
Systemets tillst?nd vid tidpunkten t beskrivs av en dimensionell vektor X(t).
X(t) = ….. , X(t)  R n (R ?r m?ngden av alla reella tal)
R n (R ?r m?ngden av alla reella tal)
t 

Systemets utveckling ?ver tiden beskrivs av funktionen
G (X 0 , t,  ) , var
) , var
X 0 – systemets initiala tillst?nd;
t ?r tid;
 - parametervektor.
- parametervektor.
Funktionen g(*) kallas ?ven f?r ?verg?ngsfunktionen
Funktionen g(*) ?r en regel som beskriver det aktuella tillst?ndet som en funktion av tid, initiala f?rh?llanden och parametrar.
Till exempel: X t = X 0 (1+  ) t = g (X 0 , t,
) t = g (X 0 , t,  )
)
Funktionen g(*) ?r i allm?nhet inte k?nd. Det anges vanligtvis implicit som en l?sning p? ett system av differensekvationer.
En differensekvation eller ekvationssystem ?r en ekvation i f?ljande form: F (t, X t , X t +1 , …, X t + m ,  ) = 0 (1),
var
) = 0 (1),
var
Xt ?r systemets tillst?nd vid tidpunkten t.
L?sningen av ekvation (1) ?r en sekvens av vektorer
Xt =  X 0 , X 1 ,…,
X 0 , X 1 ,…, 
Man brukar anta att ekvation (1) kan l?sas analytiskt med avseende p? X t + m och skrivas om i form av de s? kallade ekvationerna - s?ger:
Xt+m = f (t, Xt, Xt+1, …,Xt+m-1,  )(2)
)(2)
Till exempel:
Xt +2 = Xt + Xt +1 /2 +  t
t
Vilket system som helst kan representeras i formen (2) alltid?
Differensekvation (2) kallas linj?r om F(*) ?r en linj?r funktion av tillst?ndsvariablerna (inte n?dv?ndigtvis linj?r med avseende p?  )
)
I ekvationerna (1) och (2) kallas v?rdet m systemordning?r inte en allvarlig begr?nsning, eftersom systemet ?r h?gre ordning genom att inf?ra ytterligare variabler och ekvationer.
Exempel: X t \u003d f (X t -1, Y t -1) - 2:a ordningens system
Vi introducerar Y t \u003d X t -1 
X t \u003d f (X t -1, Y t -1)
D?rf?r kommer vi endast att ?verv?ga system av f?rsta ordningen av f?ljande form:
Xt-1 = f(t, Xt,  )
(3)
)
(3)
Ekvation (3) kallas autonom om t inte ing?r i den som ett separat argument.
Exempel:
T?nk p? dynamiken i anl?ggningstillg?ngar p? f?retaget
K t ?r kostnaden f?r f?retagets anl?ggningstillg?ngar under period t.
 - avskrivningstakt, det vill s?ga % av anl?ggningstillg?ngar som tagits ut fr?n f?retaget under ?ret.
- avskrivningstakt, det vill s?ga % av anl?ggningstillg?ngar som tagits ut fr?n f?retaget under ?ret.
I t = investeringar i anl?ggningstillg?ngar.
K t +1 = (1 -  )K t + I t ?r en f?rsta ordningens ekvation, linj?r, om I t = I, d?
)K t + I t ?r en f?rsta ordningens ekvation, linj?r, om I t = I, d?
K t +1 = (1 -  )K t + I ?r en autonom ekvation
)K t + I ?r en autonom ekvation
Om I t = I(t) ?r icke-autonom (beror p? t)
L?sningen av ekvation (3) ?r en sekvens av tillst?ndsvektorer (Xt) som uppfyller ekvation (3) f?r alla m?jliga tillst?nd. Denna sekvens kallas systemets bana. Ekvation (3) visar hur systemets tillst?nd f?r?ndras fr?n period till period, och systemets bana ger dess utveckling som en funktion av initialf?rh?llandena och milj?ns tillst?nd  .
.
Om initialtillst?ndet X 0 ?r k?nt ?r det l?tt att f? en sekvens av l?sningar genom att iterativt till?mpa relation (3), vi f?r ?verg?ngsfunktionen enligt f?ljande:
Xt+1 = f (t, Xt,  )
)
X 1 \u003d f (0, X 0,  ) = g (0, X 0 ,
) = g (0, X 0 ,  )
)
X 2 \u003d f (1, X,  ) = f (1; f (0, X 0 ,
) = f (1; f (0, X 0 ,  );
); ) = g (1, X 0 ,
) = g (1, X 0 ,  )
)
Xt+1 = f (t, Xt ,  ) = f (t, g, (t – 1, X 0 ,
) = f (t, g, (t – 1, X 0 ,  ),
), ) = g (t, X 0 ,
) = g (t, X 0 ,  )
)
Om f (*) ?r en enkelv?rdig, ?verallt definierad funktion, s? finns det en unik l?sning av ekvation (3) f?r vilken X 0 som helst.
Om funktionen har formen f (t, X t ,  )
=
)
=
 / X t definieras inte ?verallt.
/ X t definieras inte ?verallt.
Om f(*) ?r en kontinuerlig differentialfunktion s? blir l?sningen ocks? j?mn med avseende p?  och X0
och X0
Den resulterande l?sningen beror p? initialtillst?ndet X 0 .
Problemet med gr?nsvillkoret best?r av ekvation (3) och gr?nsvillkoret som anges i formeln:
X s = X s (4)
Om i ekvation (4) - S = 0, s? kallas det initialtillst?ndet.
Ekvation (3) har m?nga l?sningar, och ekvation (3) + (4) - systemet ?r den enda l?sningen, d?rf?r finns det allm?nna och speciella l?sningar till skillnadsekvationen (3):
X t g = X(t, c,  ) = (X t (X t +1 = f (t, X t ,
) = (X t (X t +1 = f (t, X t ,  ))) , d?r parametern e indexerar en viss l?sning.
))) , d?r parametern e indexerar en viss l?sning.
X t - bidragsbeloppet f?r tillf?llet t
Z - % i takt
Xt+1 = Xt (l+z); X 0 = ...
X 1 = X 0 (1 + z)
X 2 \u003d X 1 (1 + z) \u003d X 0 (1 + z) 2 \u003d g (X 0, t, z) d?r t \u003d 2

Om du kan hitta en generell l?sning p? systemet (3) . vi kommer att ha fullst?ndig information om systemets beteende ?ver tid, det blir l?tt att avg?ra hur systemet reagerar p? ?ndrade parametrar.
Tyv?rr finns den allm?nna l?sningen endast f?r vissa klasser av den l:te ordningen (s?rskilt f?r linj?ra system)
Autonoma system
Beteendet hos autonoma system ges av differensekvationen
X t +1 \u003d f (X t,  )
(1)
)
(1)
Autonoma system modellerar situationer d?r systemets struktur f?rblir densamma ?ver tid. Detta g?r det m?jligt att anv?nda en grafisk metod f?r analys.
X t \u003d 1 \u003d f (t, X t,  )
)
 X t \u003d X t +1 - X t \u003d f (t, X t,
X t \u003d X t +1 - X t \u003d f (t, X t,  ) - Xt = d (t, Xt,
) - Xt = d (t, Xt,  )
(2)
)
(2)
Funktionen d (*) visar hur mycket systemets tillst?nd kommer att f?r?ndras fr?n period till period. Vid varje punkt Xt kan man associera en vektor  X t i motsvarande ekvation (2) Funktionen d (*) kallas i detta sammanhang vektor f?lt
X t i motsvarande ekvation (2) Funktionen d (*) kallas i detta sammanhang vektor f?lt
 Xo/t = 0
Xo/t = 0
F?r autonoma system  och
och 
I autonoma system f?ljer alla system som n?gonsin har tr?ffat punkt X 0 samma bana. I icke-autonoma system beror beteendet ocks? p? n?r systemet kom in i punkt X 0.
Under det initiala villkoret X 0 f?r autonoma system till?mpar vi ekvation (1):

 till?mpas tv? g?nger i f?ljd.
till?mpas tv? g?nger i f?ljd.
I systemet ovan betyder f t resultatet av att funktionen f() appliceras iterativt p? dess argument t g?nger. Funktionen f t visar vart systemet kommer att g? i t perioder fr?n initialtillst?ndet.

X t - d?r systemet kommer att flytta fr?n punkt X 0 under t tidsperioder.
Funktionen f t kallas ibland systemets fl?de.
stabila tillst?nd. Periodiska j?mvikter. Stabilitet.
Med tiden g?r systemet till ett stabilt tillst?nd. D?rf?r kommer vi att vara intresserade av systemets asymptotiska beteende som t -> ?.
T?nk p? systemet 

D?rf?r, om 
 finns allts?
finns allts?  .
.
Punkt X som uppfyller ekvationen  kallas den fasta punkten f?r kartl?ggningen
kallas den fasta punkten f?r kartl?ggningen  .
.
Punkt  kallas i samband med dynamiska system ett stabilt tillst?nd eller ett station?rt tillst?nd.
kallas i samband med dynamiska system ett stabilt tillst?nd eller ett station?rt tillst?nd.
Fasta punkter anv?nds ofta f?r att studera det l?ngsiktiga beteendet hos dynamiska system.

om  , sedan 1 annars 0
, sedan 1 annars 0
Lyapunovs stabilitetsteori
Punkt  kallas Lyapunov stabil om f?r vilket nummer som helst
kallas Lyapunov stabil om f?r vilket nummer som helst  det finns ett s?dant nummer
det finns ett s?dant nummer  ,
, det av tillst?ndet
det av tillst?ndet  f?r alla
f?r alla  .
.


 ?r l?ngden p? vektorn p? planet.
?r l?ngden p? vektorn p? planet.
 - j?mviktstillst?nd.
- j?mviktstillst?nd.
 ?r normen f?r vektorn X.
?r normen f?r vektorn X.


Punkt  kommer att vara Lyapunov stabil i fallet n?r systemet en g?ng kom in i n?rheten av punkten
kommer att vara Lyapunov stabil i fallet n?r systemet en g?ng kom in i n?rheten av punkten  och kommer att stanna i n?rheten
och kommer att stanna i n?rheten  .
.
Punkt  kallas asymptotiskt stabil i betydelsen Lyapunov om:
kallas asymptotiskt stabil i betydelsen Lyapunov om:

F?r asymptotiskt stabila system kommer systemet med tiden n?rmare och n?rmare sitt j?mviktstillst?nd.
Systemet beter sig s? h?r:



 – systemfl?de
– systemfl?de
 – vart tar systemet v?gen efter k steg
– vart tar systemet v?gen efter k steg
Periodisk l?sning av ett dynamiskt system  kallas l?sning i formen
kallas l?sning i formen  d?r p ?r perioden f?r systemet eller perioden f?r banan.
d?r p ?r perioden f?r systemet eller perioden f?r banan.
Den periodiska l?sningen ?r allts? en fast punkt i kartl?ggningen  .
.

fixpunkt 
Kontrollera om det finns en fast punkt  :
:
 vilken punkt som helst ?r fast.
vilken punkt som helst ?r fast.



Skal?ra linj?ra system
Skal?ra linj?ra system har formen:  (1)
(1)
 ?r ekvationen som ges vid tidpunkten t.
?r ekvationen som ges vid tidpunkten t.
Om i ekvation (1)  , d?
, d?  , d? kallas det homogen.
, d? kallas det homogen.
Homogena linj?ra system
F?r skal?ra system ?r det bekv?mt att analysera systemets beteende med hj?lp av ett fasdiagram. Fasdiagrammet ?r en beroendegraf 
Fall 1.0 ?r analytiskt stabil F?r 0 Fall 2. -1 d?mpade vibrationer Fall 3. a>1 Fall 4. a<-1 Fall 5. a = 1 Fall 6. a = 0 Fall 7. a = -1 x t+1 = -x t Om en Den allm?nna l?sningen av homogena linj?ra system har formen: P? Inhomogena linj?ra system av f?rsta ordningen I analysen av inhomogena system spelar principen om "superposition" en viktig roll. Det ligger i det faktum att den allm?nna l?sningen av ekvation (1) kan skrivas i form av en ekvation: var Autonom ekvation (1) 1.
2.
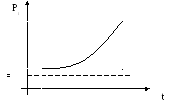
Bevis: Om en Om en T?nk p? funktionen 2. [N?dv?ndighet] Vi har visat att om vi b?rjar med n?gon l?sning L?t oss ha tv? l?sningar (1), Beteckna Autonoma linjesystem X t +1 =ax t + U (3) Om en Om en I fall n?r Om en Den allm?nna l?sningen (3) har formen: Betrakta gr?nsvillkoret x s =x s: Icke-autonoma linj?ra system Xt +1 =ax t + U t X t+1 =ax t +U t =a(ax t-1 +U t-1)+U t =a 2 x t-1 +a U t-1 + U t = a 2 (ax t-2 +U t-2)+ aU t-1 + U t = a 3 x t-2 +a U t-2 + aU t-1 + U t)= Om en Om en Antag att sekvensen U t ?r avgr?nsad, dvs. U t <= Sedan - gr?nsv?rde. EKONOMISKA TILL?MPNINGAR AV TEORIN OM LINJ?RA SYSTEM Spindeln?tsmodell f?r marknadsj?mvikt. De viktigaste antagandena f?r modellen: efterfr?gekurvans linj?ra karakt?r linj?r utbudskurva j?mlikhet i utbuds- och efterfr?ganskurvan Mening: J?mvikt: d 0 -d 1 P t \u003d S 0 + S 1 P t-1 d 1 P t \u003d d 0 -S 0 -S 1 P t-1 |: d 1 Pt = F?r att priserna ska konvergera till j?mviktspriset ?ver tiden ?r det n?dv?ndigt att f?rh?llandet utbudet ?r brantare ?n efterfr?gekurvan. d 1 p * \u003d d 0 -S 0 -S 1 p * F?r ett mer rationellt beteende b?r tillverkarna i sina beslut ta h?nsyn inte bara till nuvarande utan ?ven framtida marknadsf?rh?llanden. F?r marknadens normala funktion ?r s?ledes de ekonomiska akt?rernas f?rm?ga att bilda sig en f?rv?ntning om framtiden (g?ra prognoser) viktig. Dynamiken i priserna p? finansmarknaderna. S - fastighetserbjudande D - efterfr?gan p? fastigheter P t ?r v?rdet p? aktierna f?r tillf?llet t. d t ?r dissidenter vid tidpunkten t. r ?r r?ntan p? inl?ningskonton. Arbitrage ?r en situation som g?r att en investerare kan f? omedelbar vinst utan risk genom att k?pa en tillg?ng till ett l?gt pris och omedelbart s?lja den vidare till ett h?gre pris. En marknad s?gs vara effektiv om den saknar arbitragem?jligheter. L?t oss anv?nda principen om inget arbitrage f?r att f? en balanskvot f?r v?rdet p? aktier. Om exemplet med Kharkov fastigheter: P t \u003d 30 tusen dollar. D t =2 tusen dollar per ?r - hyresavgift F?RV?NTNINGSMEKANISMER 1. Modell av adaptiva f?rv?ntningar 0
1
Antag att d t =d=const f?r n?got t Gemensamt beslut: a<1,
a t P 0 – spekulativ komponent 2. Modell av rationella f?rv?ntningar Nackdelen ?r den l?ga inl?rningshastigheten hos marknadsdeltagarna. Detta ?ppnar m?jligheten f?r interteporalt arbitrage, d.v.s. spekulationer om f?rv?ntade f?r?ndringar i aktiekurser under efterf?ljande perioder. F?r att eliminera denna logiska mots?gelse f?reslogs modellen f?r rationella f?rv?ntningar p? 1970-talet (R. Lucas). K?rnan i modellen ?r att marknaden i genomsnitt inte systematiskt kan g?ra misstag vid uppskattning av priset p? tillg?ngar. Till?mpat p? v?r modell inneb?r detta f?ljande: investerare b?r inte systematiskt misstas n?r de uppskattar v?rdet p? aktier. E t – uppskattningsfel L?t oss ?verv?ga en extrem version av modellen f?r rationella f?rv?ntningar (modellen med fullst?ndig framf?rh?llning), d?r uppskattningsfelet ?r 0. Fr?n den fullst?ndiga framsynsmodellen, anta att E t =0, dvs. Betrakta dynamiken i aktiekurserna i en modell med fullst?ndig framf?rh?llning. Skiljedomsvillkor: (1+r) Pt =dt P t+1 =(1+r) Pt-d (3) P t ?r instabil, P t ->?, eftersom (1+r) >, om vi inte utg?r fr?n en fast punkt: Om P t = , d? P t + k = d=0, Pt+1 =(l+r) Pt I den fullst?ndiga framsynsmodellen spelar investerarnas f?rv?ntningar rollen som en sj?lvuttryckande profetia; tillg?ngspriserna kan stiga i det o?ndliga investerare tror att de kommer att stiga. I en s?dan modell dominerar s?ledes den spekulativa komponenten av aktiekursen ?ver dess fundamentala v?rde. DYNAMISKT SYSTEM, en matematisk modell av utvecklingen av ett verkligt (fysiskt, biologiskt, ekonomiskt, etc.) system, vars tillst?nd vid varje tidpunkt ?r unikt best?mt av dess initiala tillst?nd. Historik referens. Grundarna av teorin om dynamiska system ?r A. Poincare och A. M. Lyapunov. I slutet av 1800- och b?rjan av 1900-talet uppt?ckte och studerade de en klass av problem (inom himlamekanik, i teorin om j?mviktsfigurer f?r en roterande v?tska, etc.), d?r det var n?dv?ndigt att k?nna till beteendet hos mer ?n en individuell l?sning x(t) av ett system av vanliga differentialekvationer (ODE), men av alla (eller v?ldigt m?nga) l?sningar som motsvarar olika initiala tillst?nd i ett reellt (till exempel fysiskt) system. I det h?r fallet kan x(t) representeras som en kurva i rymden av alla m?jliga tillst?nd (d.v.s. v?rdena f?r vektorerna x) och man kan anv?nda de geometriska egenskaperna f?r denna kurva f?r att f?rst? och beskriva egenskaperna hos l?sningen x(t). En s?dan kurva kallas en fasbana. Under den f?rsta tredjedelen av 1900-talet utvecklades teorin om ett dynamiskt system i verk av ett antal matematiker. Verken av A. A. Andronov, som ins?g och visade med viktiga exempel att teorin om ett dynamiskt system ?r effektiv f?r att studera olinj?ra processer i naturen och i laboratoriet, var av st?rsta vikt. Vid denna tidpunkt blev behovet av att studera icke-linj?ra problem uppenbart, eftersom den linj?ra matematiska apparaten ofta inte kan beskriva verkliga processer. Andronov beskrev sj?lvsv?ngningar med hj?lp av Poincar?-gr?nscykler och skisserade konturerna av en ny vetenskap - olinj?r dynamik. Tillsammans med L. S. Pontryagin introducerade han konceptet med ett grovt system ok?nsligt f?r sm? f?r?ndringar i parametrar. Ett s?dant system ?ndrar inte drastiskt sina egenskaper f?r sm? f?r?ndringar i parametrar, dvs dess tillst?nd f?re och efter ?ndring av parametrarna ?r topologiskt identiska (ekvivalenta). Grova system fyller ?ppna ytor i funktionsutrymmet f?r alla dynamiska system. Utanf?r dessa regioner och i synnerhet p? deras gr?nser finns icke-grova system. Passagen genom gr?nsen ?tf?ljs av en bifurkation - en f?r?ndring i det dynamiska systemets struktur. I en familj av dynamiska system som ?r beroende av en parameter, genom att k?nna till det dynamiska systemets struktur vid parameterns initiala v?rde och alla bifurkationer, kan man entydigt f?ruts?ga dess struktur vid parameterns ?ndliga v?rde. Under andra h?lften av 1900-talet utvecklade D. V. Anosov, V. I. Arnold, R. Bowen, R. Manet, Ya. G. Sinai, S. Smale, S. Hayashi, L. P. Shilnikov och andra Andronovs id?er och skapade en djup och sammanh?ngande teori om ett dynamiskt system, som ger korrekta id?er om deterministiska processers natur och l?ter dig utforska modeller av verkliga system. Egenskaper hos ett dynamiskt system. Definitionen av ett dynamiskt system inkluderar tillst?ndsrummet (x) och operatorn (lagen) f?r utvecklingen f t beroende p? tid t, enligt vilken systemet fr?n initialtillst?ndet x 0 kommer till tillst?ndet x t vid tidpunkten t. Tillst?ndet f?r ett dynamiskt system beskrivs av en upps?ttning variabler x, valda p? grund av naturligheten i deras tolkning, enkelhet i beskrivningen, symmetri etc. Upps?ttningen av tillst?nd (faser) i ett dynamiskt system bildar ett fasutrymme d?r varje tillst?nd motsvarar en punkt, och evolutionen representeras av en punkts r?relse l?ngs en fasbana - en kurva inb?ddad i fasrummet. Till exempel beskrivs r?relsen av n partiklar under inverkan av attraktionskrafter i fasutrymmet av upps?ttningen av alla upps?ttningar av koordinater och hastigheter f?r dessa partiklar, och evolutionsoperatorn best?ms av l?sningen av motsvarande system av ODEs. Funktioner i systemets utveckling manifesteras i typen av fasbanor. I synnerhet motsvarar j?mviktstillst?ndet f?r ett dynamiskt system en degenererad bana - en punkt i fasrummet, en periodisk r?relse - en sluten kurva, en kvasi-periodisk r?relse, som har m basfrekvenser i spektrumet, - en kurva p? en m-dimensionell torus inb?ddad i fasrummet. Den station?ra regimen (stabil r?relse) av ett dissipativt system motsvarar en attraktion - en upps?ttning banor som attraherar alla n?ra banor till sig sj?lva. De stadiga periodiska sv?ngningarna motsvarar gr?nscykeln - en isolerad (i fasutrymmet) sluten bana; kaotiska sj?lvsv?ngningar motsvarar vanligtvis en konstig attraktionskraft - en attraherande upps?ttning som best?r av instabila banor. Beroende p? ekvationernas karakt?r och forskningsmetoder delas dynamiska system in i ?nddimensionella (med ett ?ndligt dimensionellt fasutrymme) och o?ndligt dimensionella (f?rdelade). ?nddimensionella dynamiska system kan delas in i konservativa och dissipativa, vilket motsvarar de verkliga systemens olika fysiska natur. Konservativa dynamiska system ?r system med en konserverad fasvolym. De bildas av Hamiltonska system med en tidsoberoende Hamiltonsk funktion. F?r dissipativa system bevaras inte fasvolymen, i deras fasutrymme finns ett begr?nsat omr?de (f?rlustbollen), i vilken en punkt f?r alltid faller p? vilken bana som helst. Dynamiska system kan ocks? delas in i system med kontinuerlig och diskret tid. Dynamiska system med kontinuerlig tid ges vanligtvis av ODE-systemet x = f(x) (x ?r en skal?r eller vektorkvantitet, punkten anger differentiering med avseende p? tid), d?r det finns en unik l?sning f?r varje initialpunkt x. J?mviktstillst?ndet x 0 f?r ett s?dant dynamiskt system best?ms fr?n ekvationen f(x 0) = 0. Beteendet i n?rheten av j?mviktstillst?ndet O beror p? egenskaperna hos systemet linj?rt n?ra O, n?mligen p? r?tterna l 1 , l 2 ,.., l n av den karakteristiska ekvationen d?r d ij ?r Kronecker-symbolen. L?t Re l j vara negativ f?r p och positiv f?r q r?tter, och p + q = n. Om p \u003d n (q \u003d n), kallas punkten O en stabil (instabil) nod. Banor n?ra denna punkt i fasrummet attraheras till den i fallet med en stabil nod, n?r tiden ?r t -> +?, och i fallet med en instabil nod, n?r t-> -?. Om p?0, q?0 kallas punkten O en sadel. Tv? ytor passerar genom den: p-dimensionell W s O och q-dimensionell W u O , kallade stabila och instabila grenr?r f?r sadeln O, s?v?l som stabila och instabila separatorer. Dessa ytor bildas av banor som tenderar till O som t ->+? respektive t -> -?. De ?terst?ende banorna l?mnar sadeln som t -> ± ? (Fig. 1). En bana som samtidigt ligger i W s O W u O (och inte sammanfaller med O) kallas en homoklinisk eller sadel separatrix-loop. I endimensionella modeller av ett kontinuerligt medium motsvarar en homoklinisk bana en station?r vandringsv?g i form av en soliton. Den periodiska l?sningen x = p(t) i systemet x = f(x) har f?ljande egenskap: p(t) = p(t+T) f?r vilket t som helst, d?r T ?r perioden. Denna l?sning motsvarar en sluten bana L i fasrummet. Beteendet hos banor i n?rheten av en periodisk bana L k?nnetecknas av multiplikatorer g 1 , ..., g n , som hittas med l?sningar av ett system linj?rt p? L. En av dem, till exempel g n , ?r alltid lika med 1. Om |g i |< 1 (|g i | >1) f?r alla i = 1, 2, ..., n - 1, d? ?r banan L stabil (instabil). Om p multiplikatorer ligger innanf?r och q utanf?r enhetscirkeln i det komplexa planet, p + q = n - 1, s? ?r L en bana av sadeltyp. Den ligger i sk?rningspunkten mellan tv? ytor: (p + 1)-dimensionell W s L och (q + 1)-dimensionell W u L (stabila och instabila separatorer). Ytan W s L (W u L) best?r av banor som tenderar mot L som t -> +? (t ->- ?). F?r n = 3 och p = q=1 ?r ytan W s L (W u L) topologiskt ekvivalent med en cylinder om multiplikatorn g ?r positiv och st?rre ?n 1 (Figur 2). Banornas beteende i en omgivning av L studeras genom att betrakta deras sp?r p? en (n - 1)-dimensionell yta D som sk?r (utan att r?ra) L och banor n?ra den. Om punkten m 0 p? D ?r tillr?ckligt n?ra L, s? sk?r banan som passerar genom m 0 D vid en annan punkt m, kallad sekvenskartan (Poincar?-kartan) (Fig. 3). Linj?riseringen av Poincar?-kartan vid sk?rningspunkten mellan L och D beskrivs av Jacobi-matrisen. Dess egenv?rden g 1 , ..., g n-1 ?r multiplikatorer av den slutna banan L. Stabila och instabila grenr?r av periodiska banor kan sk?ra varandra. En bana som h?r till sk?rningspunkten mellan W s L och W u L och skiljer sig fr?n L ?r homoklinisk. Om denna korsning sker utan ber?ring, finns det i n?rheten av den homokliniska banan en upps?ttning olika instabila banor, bland vilka det finns en o?ndlig upps?ttning st?ngda sadelliknande banor. En s?dan upps?ttning banor ?r typisk f?r ett dynamiskt system med kaotisk dynamik. S?ledes kan n?rvaron av en homoklin bana fungera som ett kriterium f?r f?rekomsten av kaotiska regimer i ett dynamiskt system (se Dynamiskt kaos). Tidsdiskreta dynamiska system definieras vanligtvis genom att avbilda G av fasutrymmet i sig sj?lvt: x n+1 = G(x n). D? ?r evolutionsoperatorn f t , t = m, helt enkelt kartan G applicerad m g?nger: f n x=G(G(...G(x)...)). Till exempel beskriver den enklaste modellen f?r populationsdynamik t?theten av antalet medlemmar i (n + 1) generationen, x n + 1, som en funktion av antalet x n i f?reg?ende generation: x n + 1 \u003d ax n - bx 2 n, a, b > 0 - uppgiftsinst?llningar. Beroende p? v?rdena f?r a och b, kan detta dynamiska system visa antingen regelbunden (alla attraktioner ?r periodiska banor) eller kaotisk dynamik. Poincar?-kartan definierar faktiskt ett diskret-tidssystem. Till exempel, dynamiska system som beskriver verkan av en periodisk st?rning p? ett system av ODE, som kan skrivas som x = f(x, th), th = o, d?r f ?r en periodisk vektorfunktion i th, genererar alltid Poincar? Karta. F?r s?dana system finns det en global Poincar?-sekantyta th = 0, som varje bana sk?r ett o?ndligt antal g?nger. Banornas beteende i ett system med kontinuerlig tid best?ms helt av ett dynamiskt system med diskret tid. En viktig del av teorin om ett dynamiskt system ?r den ergodiska teorin, som beskriver de statistiska egenskaperna hos banor. Om de ?r instabila, divergerar punkterna p? olika banor i evolutionsprocessen med ett betydande avst?nd fr?n varandra, trots n?rheten till de initiala tillst?nden, visar systemet ett "k?nsligt beroende" av de initiala f?rh?llandena. (Observera att om?jligheten av l?ngtidsf?ruts?gelser om v?der ?r exakt kopplat till banornas instabilitet.) f?rh?llanden. Dessa banor kan ha olika egenskaper, och variationen av dessa egenskaper kan beskrivas i termer av sannolikhetsf?rdelningar. A. Poincar? var den f?rsta som i kvalitativ form uttryckte id?n att n?r banorna f?r ett dynamiskt system ?r instabila kan vi tala om deras statistiska egenskaper av samma karakt?r, som vid den tiden redan hade n?mnts i L:s verk. Boltzmann och J.W. Gibbs om statistisk mekanik. Liknande id?er har implementerats i ergodisk teori och fyller framg?ngsrikt rollen som en "bro" mellan de deterministiska och slumpm?ssiga "v?rldarna". Med hj?lp av teorin om ett dynamiskt system har m?nga olinj?ra fenomen i natur och teknologi studerats och f?rklarats, s?som dynamiskt kaos, synkronisering av periodiska och kaotiska sv?ngningar, bildandet av dissipativa strukturer, rum-tid kaos i modeller av distribuerade system, modkonkurrens i hj?rnans neurala n?tverk, etc. . Lit.: Kvalitativ teori om dynamiska system av andra ordningen. M., 1967; Kornfeld I. P., Sinai Ya. G., Fomin S. V. Ergodisk teori. M., 1980; Resultat av vetenskap och teknik. Ser. Moderna matematikproblem. grundl?ggande riktningar. M., 1985-1991. [T. 1-9]: Dynamiska system; Katok A., Hasselblatt B. Introduktion till den moderna teorin om dynamiska system. M., 1999. V. S. Afraimovich, M. I. Rabinovich.

 -linj?r, om a=1, under 45 0 - lutningsvinkeln.
-linj?r, om a=1, under 45 0 - lutningsvinkeln.









 , d?
, d? 
 , d?
, d? 

 ,
, ,
,

 (1)
(1) -kontrollera
-kontrollera (2)
(2) ?r den allm?nna l?sningen av den homogena ekvationen (1):
?r den allm?nna l?sningen av den homogena ekvationen (1):  och kallas den komplement?ra funktionen.
och kallas den komplement?ra funktionen. ?r n?gon speciell l?sning av den inhomogena ekvationen (1).
?r n?gon speciell l?sning av den inhomogena ekvationen (1).




 ?r l?sningen av ekvation (1), allts?
?r l?sningen av ekvation (1), allts?  .
. ?r en annan l?sning av ekvation (1), allts?
?r en annan l?sning av ekvation (1), allts? 
 och kolla om
och kolla om  l?sning av ekvation (1).
l?sning av ekvation (1). och l?gg till det
och l?gg till det  , d? f?r vi l?sningen av ekvation (1). Fr?gan uppst?r om vi kommer att f? alla l?sningar av ekvation (1) p? detta s?tt. L?t oss bevisa att detta verkligen ?r fallet:
, d? f?r vi l?sningen av ekvation (1). Fr?gan uppst?r om vi kommer att f? alla l?sningar av ekvation (1) p? detta s?tt. L?t oss bevisa att detta verkligen ?r fallet: och
och  :
:



 - homogen,
- homogen,  z t = ca t
z t = ca t -
- =ca t
=ca t 
 =
= +ca t
+ca t =
= +
+ (2)
(2) = katt
= katt = a
= a  + U
+ U 
 =
=
 =
= + katt
+ katt







 ?ver tid n?r systemet staten
?ver tid n?r systemet staten  ->
-> och genom l?mpligt val av ekvationen U kan vi n? vilket tillst?nd som helst. System (3) kallas d? styrt.
och genom l?mpligt val av ekvationen U kan vi n? vilket tillst?nd som helst. System (3) kallas d? styrt. , d? kommer systemet med tiden att anta obegr?nsade v?rden oavsett ekvation och kommer d?rf?r att vara okontrollerbart.
, d? kommer systemet med tiden att anta obegr?nsade v?rden oavsett ekvation och kommer d?rf?r att vara okontrollerbart. (4)
(4)
 (5)
(5)
 , d?
, d? 
 , d?
, d? f?r n?got t.
f?r n?got t.



 d?r d0, dl >0
d?r d0, dl >0 , d?r S 1 >0, S 0 <=0 (eftersom ingen sl?pper n?got till priset 0).
, d?r S 1 >0, S 0 <=0 (eftersom ingen sl?pper n?got till priset 0).
 (*)
(*)

 eller S 1
eller S 1  det kommer att finnas divergerande sv?ngningar i systemet.
det kommer att finnas divergerande sv?ngningar i systemet.
 kurva p? diagrammet
kurva p? diagrammet



 - aktiernas f?rv?ntade v?rde vid tidpunkten t+1.
- aktiernas f?rv?ntade v?rde vid tidpunkten t+1.
 (1)
(1) -f?rv?ntat pris f?r l?genheten under n?sta period.
-f?rv?ntat pris f?r l?genheten under n?sta period. \u003d 33-2 \u003d 31 tusen dollar.
\u003d 33-2 \u003d 31 tusen dollar. =
= , d?r 0<=<=1
, d?r 0<=<=1 =
=
 =
=
 - exponentiell utj?mningsmetod (2)
- exponentiell utj?mningsmetod (2) (1)
(1)

 (2)
(2)



 0
0 , d?r Р 0 ?r aktiernas initiala v?rde.
, d?r Р 0 ?r aktiernas initiala v?rde. a t P 0
a t P 0  0
0
 aktiers grundl?ggande v?rde.
aktiers grundl?ggande v?rde.

 - opartisk uppskattning, dvs.
- opartisk uppskattning, dvs.  - ?r en opartisk uppskattning av Pt+1; eller
- ?r en opartisk uppskattning av Pt+1; eller  =Pt+1+Et
=Pt+1+Et =Pt+1
=Pt+1
 (1+r) Pt=dtPt+1
(1+r) Pt=dtPt+1 =Pt+1
=Pt+1